近年、地球温暖化や海洋汚染など環境問題が深刻化する中で、海洋環境の保護は社会の持続可能な発展(Sustainable Development)の観点から社会的に重要な課題となっています。
これらの課題に対する対策の一つとして、ROVの活用が挙げられます。ROVは、現在、海洋生態系の調査、環境汚染源の特定や海洋プラスチックの汚染対策などの環境保護活動等、様々な用途に活用されています。
本ページでは、地球環境保全関連におけるROV活用事例をご紹介します。ROVや水中ドローンに興味をお持ちの方にとって、役に立つ情報を提供できれば幸いです。ご質問などございましたら、お気軽にお問い合わせください。

なお、このソリューションに関する当社の製品・サービスは、文末の「JOHNANソリューション」欄に掲載しております。>詳しくはこちら
1. 地球環境保全関連におけるROVの活用方法
ROV(Remotely Operated Vehicle)とは、海洋や深海での作業を支援する遠隔操作される無人潜水艇のことを指します。
ROVは地球環境保全における多くの業務で使用されており、その主な活用は以下の通りです。
海洋生態系の調査
ROVは海洋生態系をカメラを用いて詳細に観察することができます。生態系のモニタリングや未知の生物種の発見が期待されます。
海洋生物のサンプリング
ROVに特別な治具を搭載し、特定の海洋生物を収集します。
海底土壌サンプリング
ROVに治具を搭載することによって土壌をサンプリングすることができます。一例として)、底質改善装置(現位置分級機)を搭載し、海底の土壌サンプルを採取する事例が挙げられます。また、現位置分級機は養殖魚の残餌を回収することも可能です。
人工魚礁や藻場等再生プロジェクトのモニタリング
人工魚礁の効果測定や藻場造成等のプロジェクトについてROVのカメラやセンサーを用いてモニタリングします。ROVで調査地点にラインを引いて調査するライントランセクト法を実施し、磯焼け地域のウニの個体数調査を実施した事例があります。
サンゴ礁モニタリング調査
ROVを用いて自然環境や人間活動の影響を受けたサンゴ礁の状態をモニタリングします。
養殖魚の生育状況の観察及び斃死魚回収
養殖網内における魚の生育状況や養殖網下の残餌状況をカメラで観察します。斃死魚が確認された場合は、マニピュレータ等を用いて回収します。
沈没船や鯨骨生態系の環境調査
沈没船や死んだ鯨骨が周囲の環境や生態系にどのような影響を与えているかを調査するためのモニタリングにROVが使用されます。
地球環境保全に関わる業務は他にも多岐にわたります。
分析が必要な専門性の高い課題が多いため、上記の事例から分かるようにROVのカメラで撮影するだけでなく、センサーを用いたりサンプリングの治具を搭載するなど、用途に合わせたオプションが必要になります。
2. 地球環境保全関連の事例紹介
地球環境保全関連の代表的な事例を、ご紹介いたします。
(1)人工魚礁のモニタリング
ROVで人工魚礁の効果測定を行います。潜水士が行っていた観察作業の一部をROVのカメラを用いて実施することができ、カメラの映像から、魚種の特定や数量、生育状況などを観察します。USBL(Ultra-Short Baseline)方式音響測位装置を用いることでカメラの映像と緯度経度を一致させることも可能です。
さらに、カメラ映像だけでなく、ROVに搭載しているセンサを用いることで、水温や水質、流速などの測定にも対応します。定期的にこれらの記録を取ることで、漁業者や研究者は重要な情報源を得ることができます。
(2)養殖マグロの生育状況の観察
ROVを用いて養殖マグロの生育状況を観察することで、魚の健康状態、群れの動き、餌の摂取状況などをリアルタイムで評価することができます。また、センサーを用いることで水温や水質も記録することができます。
撮影した映像やセンサー情報を用いてデータを解析し、報告書としてまとめて今後の改善案を提案します。
産業用 水中ドローン (ROV) MOGOOL
(3)水生植物のサンプリング
ROVにマニピュレータを搭載することで水生植物のサンプリングができます。これにより、潜水士が潜ることができない水深の水生植物も回収することが可能です。植物を傷つけることなく繊細に回収する場合はマニピュレータではなく、専用の治具を搭載して回収します。
ROVに搭載しているオプションを用いることで、生息域の水温や水質などの環境情報を取得することができます。またUSBL(音響測位装置)を搭載することで、生息域を緯度経度で把握することも可能です。
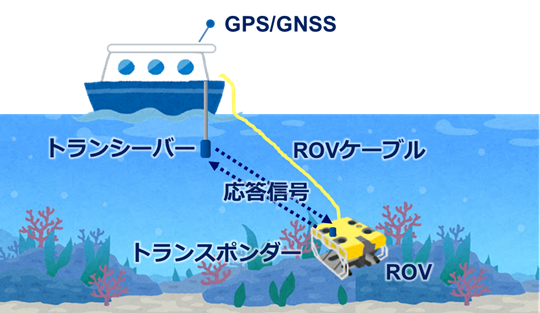
(4)USBL方式音響測位装置によるROVと船の位置把握
USBL方式音響測位装置は、上記事例でもご紹介した通り、水中のROVの位置を把握するための方法の1つです。
機能としては、まずROVに搭載したトランスポンダー(送信機)から音波を発射し、船や基地局に設置したレシーバー(受信機)で音波を受信します。その音波の到達時間や角度からROVの位置を計算してGPSと連動させることにより、緯度経度でROVの位置を表示させることが可能です。
なお、注意点としてUSBL方式音響測位装置は各社製品によって精度が変わります。また近くに構造物があった場合は音波が反射して音響干渉を起こし、正確な位置を表示できない場合があります。
3. JOHNANソリューション
当社のMOGOOLシリーズは給電式でパワースラスターを搭載し、推進力が高いため、海域での運用や多様なプション搭載を得意としています。上記で紹介した事例は当社が扱うMOGOOLシリーズの機種を用いたものとなっております。
地球環境保全に関わる業務は多様であり、お客様のご利用目的に合わせて適切なROVとオプションをご提案いたします。場合によっては、弊社から治具を開発することも可能です。ぜひお気軽にお問い合わせください。
当社の利用機種のご紹介
(1)MOGOOL-M8

サイズ(mm):H320×W425×D520
重量(Kg):17
ケーブル長(m):100,150,200
最大深度(m):150
最大速度(静止水中,Kn):3.2
水中可搬重量(Kg):2.0
特徴
- 本製品は、軽くて取り回しが楽なエントリーモデルとなります。高い推進力にも関わらず、重さ17㎏と持ち運びが便利なモデルとなります。主にダム、湖沼、港湾、内海のご利用に向いております。
- 給電式で100V電源対応のため、家庭用コンセントか発電機をご用意いただき、 利用することが可能です。
- オプションは単軸アームとソナーを搭載することによって、対象物を簡易に掴んだり、濁水下において対象物を探すことができます。
(2)MOGOOL-PRO P3000-A

サイズ(mm):H697×W484×D475
重量(Kg):36
ケーブル長(m):200,300
最大深度(m):300
最大速度(静止水中,Kn):2.5
水中可搬重量(Kg):5.5
特徴
- 本製品は、高い推進力かつコスパが良いオススメのモデルです。パワフルな機体のため、ダム、湖沼、港湾、内海はもちろんのこと、外海でもご利用いただくことが可能です。
- 給電式の200V電源に対応しており、水中可搬重量が5.5kgあるため、様々なマニピュレータやソナーを搭載することが可能です。
- 上記機種の詳細情報や他の機種につきましては、下記の製品紹介をご覧ください
(3)上記機種や他の機種につきましては、下記の製品紹介をご覧ください。
おすすめのオプション品について
当社のオプション品について、ご紹介します。
(1)USBL(Ultra Short Base Line)水中音響測位装置
GPSなどと連動させ水中に潜ったROVの位置や深度を追跡するためのシステムです。当社ではSeaTrac(Blueprint Subsea社)やTrack Link 1500(LinkQuest社)の搭載実績がございます。
当社ではUSBLで取得したデータをもとに緯度経度の地図上に、船やROV、目標物を表示させてカーナビのようにROVを操作できる「スリーポイントビューワ」ソフトを開発しております。
(2)マニピュレータ
MOGOOLシリーズは機種によって搭載できるものは限定されますが、単軸、二軸、五軸のマニピュレータをそれぞれ用意しております。
マニピュレータの先端に搭載するハンドも多様な種類を用意しております。単純に掴むだけの機能であっても多種多様な形状を用意しております。切断グリッパーもございます。
アフターサービスについて
MOGOOLシリーズのメンテナンスや修理は、当社の京都にて随時対応しておりますので、安心してご利用いただけます。ご不明な点やご質問などございましたら、お気軽にお問い合わせいただけますと幸いです。
関連ソリューション
WEB商談も対応可能!製品情報・御見積に関するご依頼・ご質問等お気軽にお問い合わせください。
(平日8:30~17:00)