原理試作・PoC 開発委託サービス
画像AI・ROSを活用し、原理試作で現場の課題を解決
当社では、人の労働力を最大化する工場を実現するためにAIやROSを活用した研究開発を行っています。関連技術の共同研究、PoC開発受託も行っておりますので、ご興味がある方はお気軽にお問い合わせください。他社向けに「画像AI」や「ロボット制御」のような先端技術を活用した原理試作の受託開発も行なっています。
なお、今回ご紹介している内容は、当社が持つ技術や実績のごく一例に過ぎません。お客様が「実際にやりたいこと」や現場の固有の課題に合わせて、随時様々な技術を用いて、必要な原理試作・製品開発のステップをご提案いたします。「こんなことはできないか?」というアイデア段階から、まずはお気軽にご相談ください。
原理試作・PoC開発について相談する
お問い合わせ01.技術の定義
「画像AI × ROS」とは
現代のものづくりや現場の自動化における高度な新技術開発では、「本当に動作するのか」「性能を満たせるのか」といった技術的リスクが常に付きまといます。高度技術の内製化が難しい中で、開発の後戻りリスクを最小限に抑えるためには、多分野の専門知識をシームレスに融合させることが不可欠です。
当社では、これらの技術を活用し、試作品の「視覚・認識・判断」として機能させることで、お客様のアイデアを最短ルートでカタチにする原理試作を提供しています。
画像AIとは
対象物が何であるか、どのような状態であるかを正しく「認識」する技術です。物体認識、異常検知、行動分析などに特化したカスタムAIモデルを構築・実装し、システムにおける人間の「目」の役割を担います。これにより、現場の状況や変化を正確に捉え、AIを用いた検査、選別、ナビゲーションシステムなどの原理を迅速に検証することが可能になります。
ROS(Robot Operating System)とは
カメラ情報やその認識結果を3次元空間上の情報に変換し、ロボットの高度な「モーションプランニング(動作計画)と制御」を行うシステムです。多関節ロボットの複雑なマニピュレーション(物体操作)や協調動作などの制御を可能とします。
事業の動画紹介
02.対応フェーズ
仕様検討から原理検証(PoC)まで
新技術開発における「実現性の不透明さ」は、計画の遅延やコスト増大の大きな要因となります。シミュレーション結果だけでは十分な検証が行えず、開発の後期段階で問題が発覚して手戻りが発生するケースも少なくありません。
当社は、お客様の課題や不安に寄り添いながら、仕様検討から原理検証(PoC)、そして将来の量産までを見据え、確実なステップで一貫して開発をサポートいたします。
(1)仕様検討(お客様のアイデアの具体化)
「ものづくり現場を自動化したい」「最先端技術を導入したいが何から始めればいいか分からない」という段階から、詳細なヒアリングを行います。お客様のアイデアや解決したい課題、目標とする機能を深く理解し、実現に必要な技術要素(ハードウェア、ソフトウェア、AIアルゴリズム)を洗い出し、最適なアーキテクチャや解決アプローチを定義します。
(2)実現可能性調査(フィージビリティスタディ・原理検証計画の立案)
提案したシステムが技術的に実現可能かどうかを多角的に評価します。JAXA宇宙探査イノベーションハブでの共同研究実績をはじめ、公的プロジェクトや大学との共同開発で培ったノウハウを活かし、試作品のスコープ、使用技術(AI/ROSなど)、予算、スケジュールを策定して原理検証計画を立案します。
(3)原理検証・PoC開発(原理試作の開発受託と評価)
計画に基づき、AI画像認識の試作やROSによる動作計画など、コアとなる最先端技術を組み込んだ原理試作機の設計、開発、組み立て、機能実装を行います。完成した試作品はお客様とともに評価・フィードバックを行い、動く試作品によって目標とする機能や性能が実現可能かを明確に証明(PoC)します。これにより、本格的な製品開発の前に手戻りを防止し、無駄な投資を避け、次のフェーズの製品設計に直結するデータと知見を得ることができます。
当社は、これら「仕様検討〜原理検証」に留まらず、原理試作後の量産試作、開発、生産までを一気通貫でサポートできる体制を整えています。本格的な製品開発の前に、動く試作で技術リスクを可視化し、他社に先駆けた迅速な市場投入(Time to Market)を支援します。
自社の要件が対応可能か、仕様検討の相談をしてみる
お問い合わせ03.保有技術の紹介
原理試作・PoC開拓(委託)サービスを展開する上で保有している技術や特許をご紹介いたします。
(1)3Dオブジェクトトラッキング
-

ロボットアームにつけた3Dカメラで、不規則に動くオブジェクトをリアルタイムにトラッキングする技術です。人の手のような複雑な動きにも追従できるため、人と協調作業のように複雑なロボット制御を実現します。
(事例)
・協働ロボットを使った人への部品配給、人から部品を受けとる動きを実現
・不規則に動き回る対象物を追尾・把持する
(2)3D作業認識(ジェスチャー認識)
-
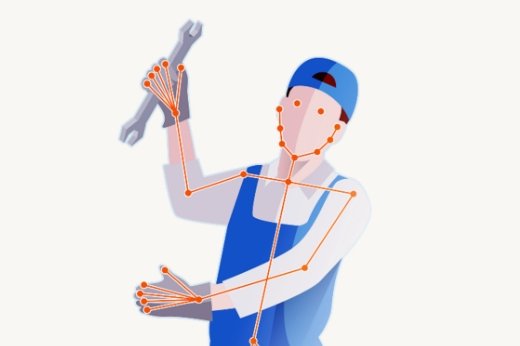
カメラが画像からリアルタイムで人の姿勢を検出する技術です。小型、高速なアルゴリズムのため組込み機器で実行できます。ロボットが一緒に働く人の作業内容を理解し、それに応じたサービスを提供することを実現します。
(事例) 複数カメラを使用して作業者の作業動作を3次元的に認識する。
(3)3D環境理解
-

ロボットアームにつけた3Dカメラで作業環境を認識する技術です。ロボットアームを動かしながら作業環境の3次元モデルを作成し、ロボットのモーションプランニングに入力できます。未知の対象物の把持位置を算出する技術も開発中です。
(事例) ロボットアームにつけたRGB-Dカメラで作業環境を認識する
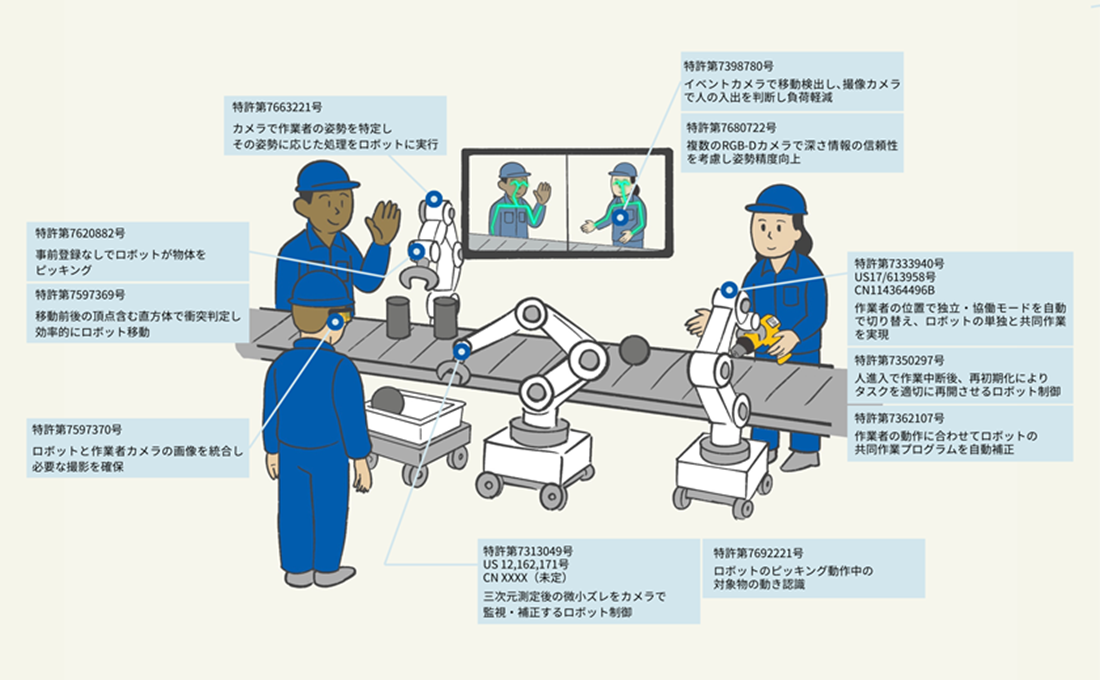
04.保有特許
人間とロボットの安全で効率的な協働を実現する当社の保有特許をご紹介します。カメラで作業者の姿勢や状態を認識し、ロボットの動作を自動で制御・最適化することで、ロボット自身が状況を判断し、臨機応変に対応できる能力の向上に貢献します。
本技術に関するご不明な点は、どうぞお気軽にお問い合わせください。
05.実績紹介(導入事例一覧)
お客様に「自社の業界や用途でも応用できる」という具体的なイメージを持っていただくため、これまでの原理試作の取り組みを一覧表で分かりやすく明示します。
当社は、人と一緒に働くロボットの実現に向けて、最先端技術を保有する大学や他企業と連携し、オープンイノベーションによる技術開発を行っています。大学との共同研究で培った先端技術、国やJAXA等の公的プロジェクトへの参画、そして現場課題を解決した具体的な導入実績により、様々な技術・ノウハウを蓄積しています。下記に、「AI画像認識・ROSを活用した導入事例」「共同開発の事例紹介」「補助金採択事例紹介」について紹介します。
(1)AI画像認識・ROSを活用した導入事例(一例)
当社は、人と一緒に働くロボットの実現に向けて、原理試作開発の受託を行っています。下記では、AI画像認識やROSを活用した物流トレイ識別、インフラ点検、汎用ピッキングなど5つの開発実績を紹介します。
(例)
・AIによるトレイ認識システム
・AIによる壁面状態認識技術
・AI + ROS による 汎用物体ピッキング
・AI + ROS による 動体ピッキング
・Raspberry Pi 工場制御システム
(2)国内主要大学・研究室との共同開発事例(一例)
当社は最先端技術を保有する大学や他企業と連携し、オープンイノベーションによる技術開発を行っています。京都大学や東京大学をはじめとした国内の研究機関と共に、レスキュー技術や高速画像処理などを産業用ロボットへ応用する共同開発を行っています。
- 京都大学・松野研究室:産業用ロボティクス技術に関する共同研究開発。
- 東京大学・石川 妹尾研究室:高速画像処理技術を活用した産業用機械の自動化システムに関する共同研究開発。
- 立命館大学・陳研究室:人姿勢認識、3次元物体認識などの共同研究。
(3)公的プロジェクト参画および補助金採択事例
当社は、人と一緒に働くロボットの実現に向けて、最先端技術を保有する大学や他企業と連携し、オープンイノベーションによる技術開発を行っています。JAXAや国、自治体等の「公的プロジェクトへの参画」および、補助金事業に採択された取り組みの実績について紹介します。
- JAXA研究提案募集 採択
テーマ:「分散協調型ロボットによる製造工場等の物品供給システムの開発研究」(京都大学松野研究室とJAXAとの共同研究による実現可能性調査) - ものづくり・商業・サービス生産性向上促進補助金 採択(2019年)
テーマ:「AI画像認識技術導入による人とロボットが協働できる生産システムの開発」 - 京都府ものづくり中小企業等経営変革緊急支援事業 採択(2020年)
テーマ:「AI画像認識技術の高度化による作業定量評価システムの開発」
06.開発プロセス
〜仕様変更にも柔軟に対応。JOHNANの伴走開発プロセス〜

最先端の画像AIやロボット制御(ROS)を組み込んだ原理試作・PoC開発では、開発の途中で新たな課題が見つかったり、仕様の変更が必要になったりすることが珍しくありません。
当社では、お客様に寄り添いながら段階的に検証を進める伴走体制を採用しています。これにより、大手のR&D部門や開発担当者様が抱く「仕様変更による追加コスト」、「納期遅延」、「開発のブラックボックス化」等の不安解消に貢献します。
07.ビジョン紹介

少子高齢化や人手不足といった日本産業の課題に応えるため、JOHNANは人とロボットが一緒に働く未来に向けた研究開発を行っています。
従来の産業用ロボットのような単なる「作業の置き換え」ではなく、「人とロボットそれぞれが得意な作業を分業する」ことで、人がロボットの力を借りて能力を最大限に発揮できるソリューションに貢献します。少量多品種・変種変量生産にも柔軟に対応し、人々がイキイキと働く工場の実現を目指してイノベーションをし続けます。
このような案件のご相談・お問い合わせも歓迎いたします
- 仕様決定済みの案件(すでに開発要件が固まっており、確実な実装・検証先をお探しの方)
- 仕様書・図面ベースの技術相談(既存の設計資料を元に、AI・ROS×3D技術の導入可否を判断したい方)
- NDA(秘密保持契約)締結後の具体的な打ち合わせ(社外秘のコア技術や、現場の具体的な課題について機密を保持して深く相談したい方)
WEB商談も対応可能!サービス・御見積に関するご依頼・ご質問等は、お気軽にお問い合わせください。
(平日8:30~17:00)