ものづくり知能化支援
技術紹介
AI・ROSを活用した共同研究、PoC開発受託を提供
当社では、人の労働力を最大化する工場を実現するためにAIやROSを活用した研究開発を行っています。関連技術の共同研究、PoC開発受託も行っておりますので、ご興味がある方はお気軽にお問い合わせください。


各種技術紹介
3Dオブジェクトトラッキング
-
ロボットアームにつけた3Dカメラで、不規則に動くオブジェクトをリアルタイムにトラッキングする技術です。人の手のような複雑な動きにも追従できるため、人と協調作業のように複雑なロボット制御を実現します。
【動画でご紹介】3Dオブジェクトトラッキング
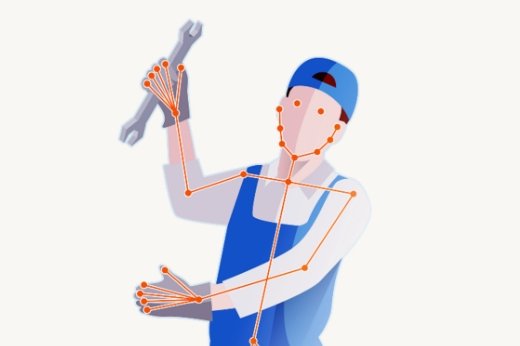
3D作業認識
-
カメラが画像からリアルタイムで人の姿勢を検出する技術です。小型、高速なアルゴリズムのため組込み機器で実行できます。ロボットが一緒に働く人の作業内容を理解し、それに応じたサービスを提供することを実現します。
【動画でご紹介】3D作業認識
3D環境理解
-
ロボットアームにつけた3Dカメラで作業環境を認識する技術です。ロボットアームを動かしながら作業環境の3次元モデルを作成し、ロボットのモーションプランニングに入力できます。未知の対象物の把持位置を算出する技術も開発中です。
【動画でご紹介】3D環境理解
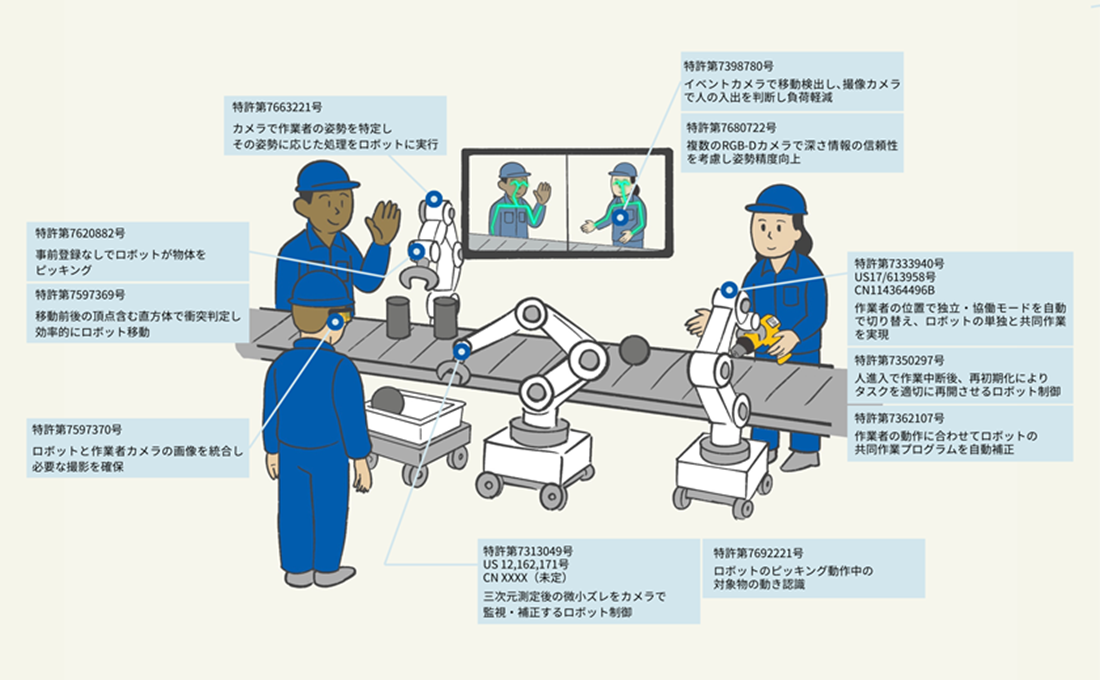
保有特許
本図は、人間とロボットの安全で効率的な協働を実現する当社の保有特許群です。
カメラで作業者の姿勢や状態を認識し、ロボットの動作を自動で制御・最適化することで、ロボット自身が状況を判断し、臨機応変に対応できる能力の向上に貢献します。
本技術に関するご不明な点は、どうぞお気軽にお問い合わせください。
ものづくり知能化支援
WEB商談も対応可能!サービス・御見積に関するご依頼・ご質問等は、お気軽にお問い合わせください。
お電話でのお問い合わせ
0120-63-20250120-63-2025
(平日8:30~17:00)