原理試作・PoC開発委託
原理試作・PoC 開発委託の実績紹介
人と一緒に働くロボットの実現を、先端技術と確かな実績で支援します
当社は、人と一緒に働くロボットの実現に向けて、最先端技術を保有する大学や他企業と連携し、オープンイノベーションによる技術開発を行っています。大学との共同研究で培った先端技術、国やJAXA等の公的プロジェクトへの参画、そして現場課題を解決した具体的な導入実績により、様々な技術・ノウハウを蓄積しています。本ページでは「原理試作の導入実績」、「共同開発の事例紹介」、「補助金による取り組み」について紹介します。
過去の取り組み
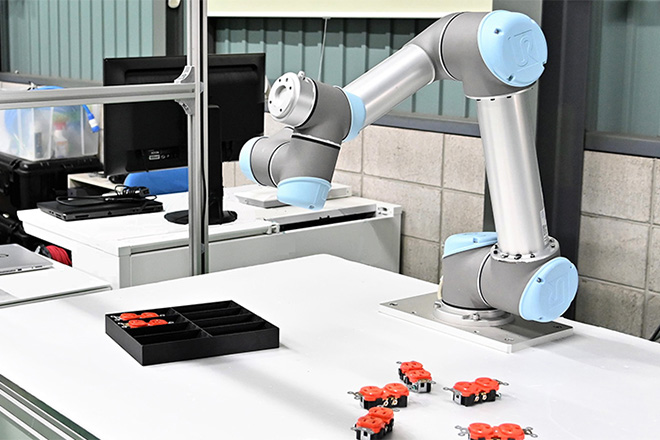
AIやROSを活用した、トレイ識別や動体ピッキングの開発実績について紹介します。

東大・京大等と連携した高速画像処理や姿勢推定等のロボット応用技術について紹介します。

JAXAや経産省等、公的機関に採択されたプロジェクトの実績について紹介します。
ものづくり知能化支援
WEB商談も対応可能!サービス・御見積に関するご依頼・ご質問等は、お気軽にお問い合わせください。
お電話でのお問い合わせ
0120-63-20250120-63-2025
(平日8:30~17:00)